Assignment: Create a self-balancing robot
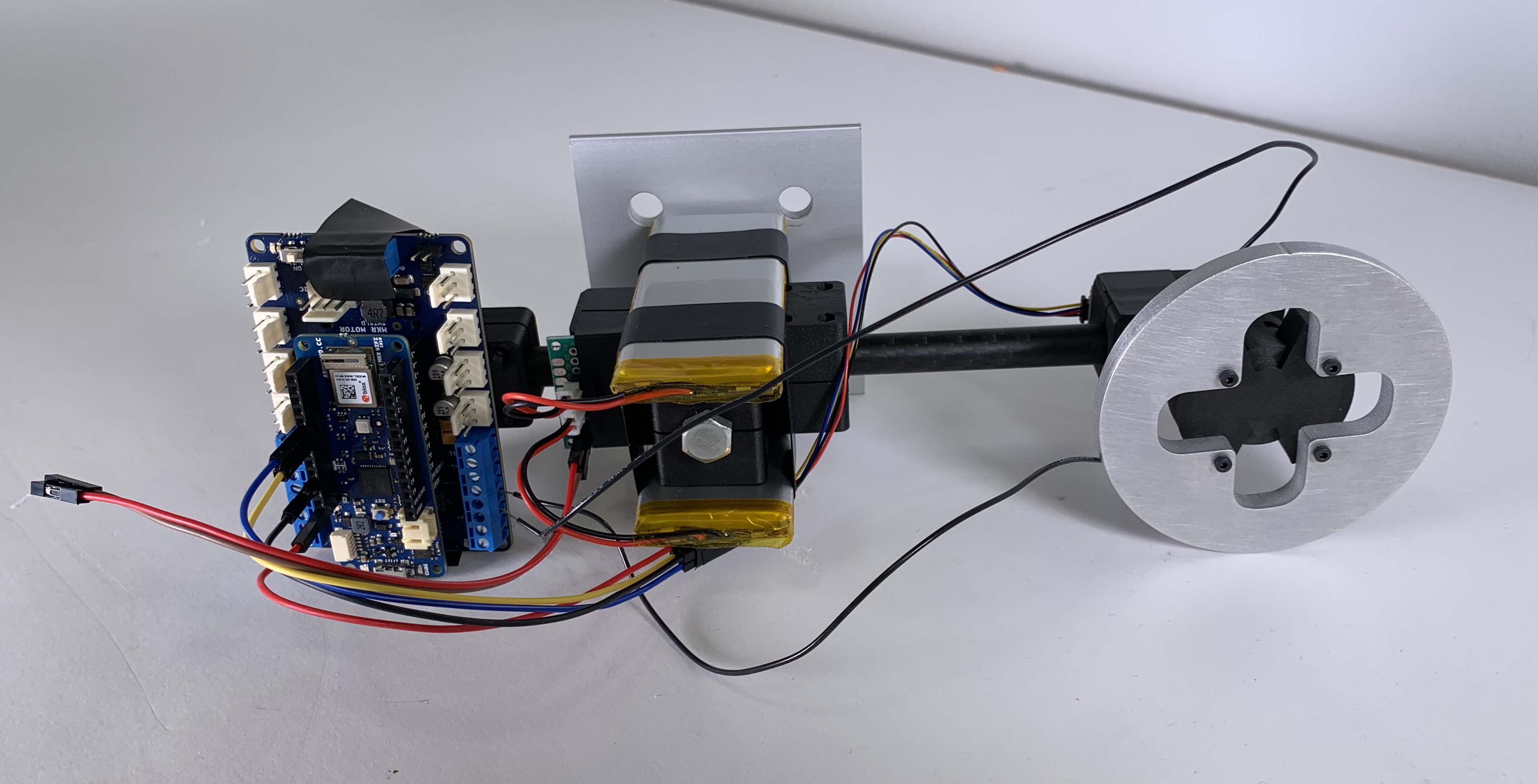
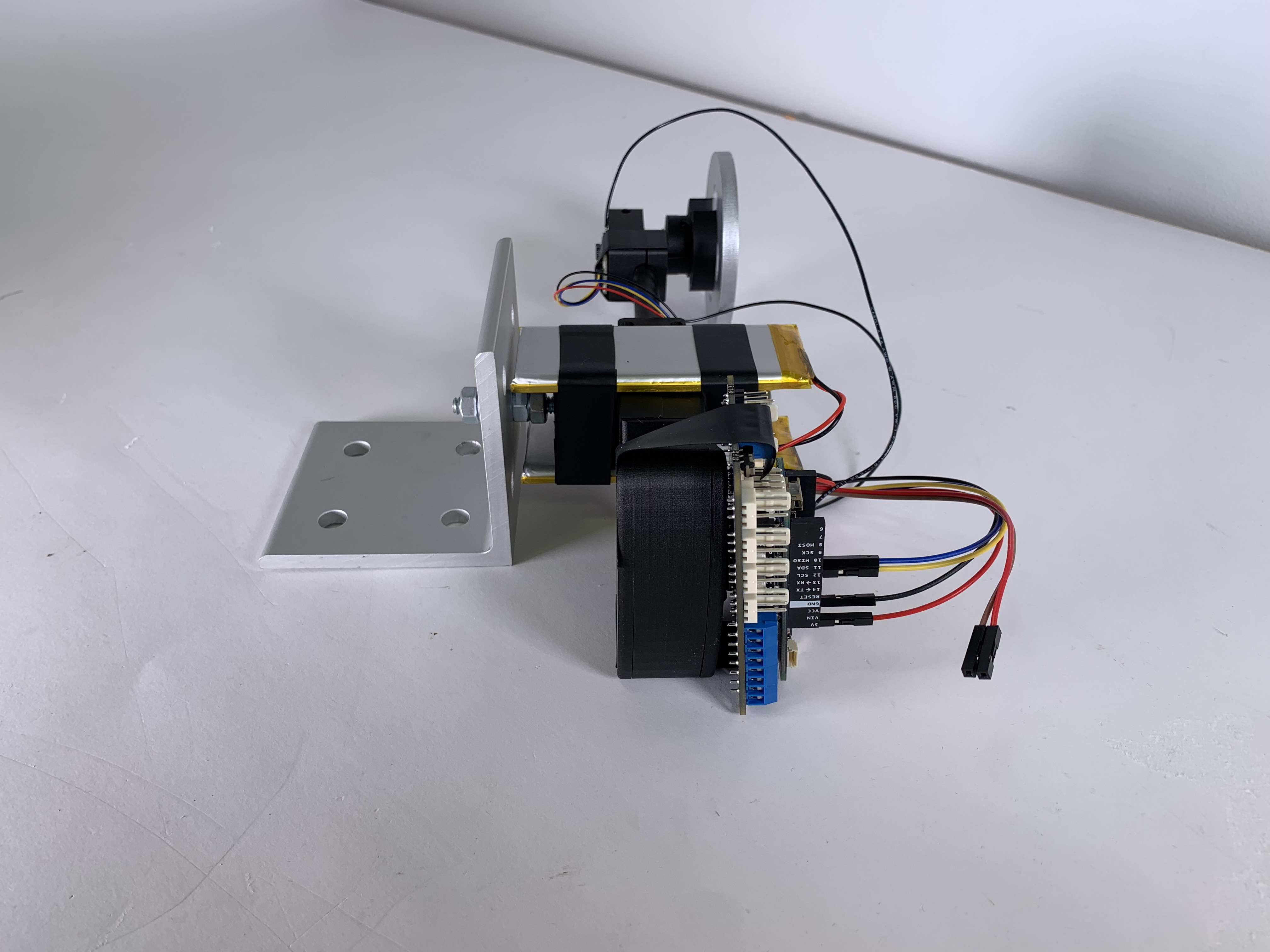
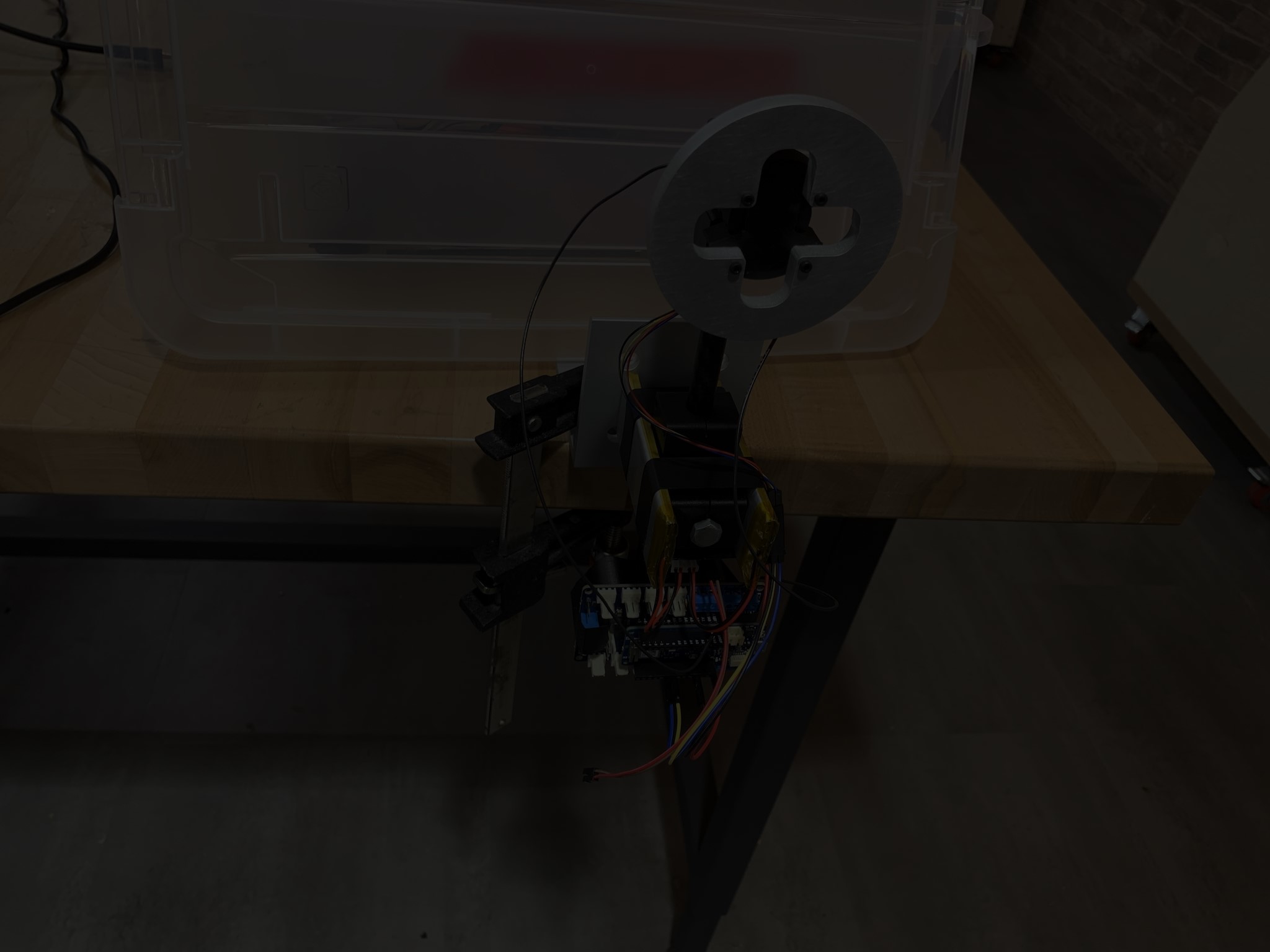
The first large project for my ME35: Robotics class was to create a self-balancing robot. We chose to design an inverted pendulum system with a weighted flywheel at the top. This flywheel would generate directional torque that would correct the system from tipping.
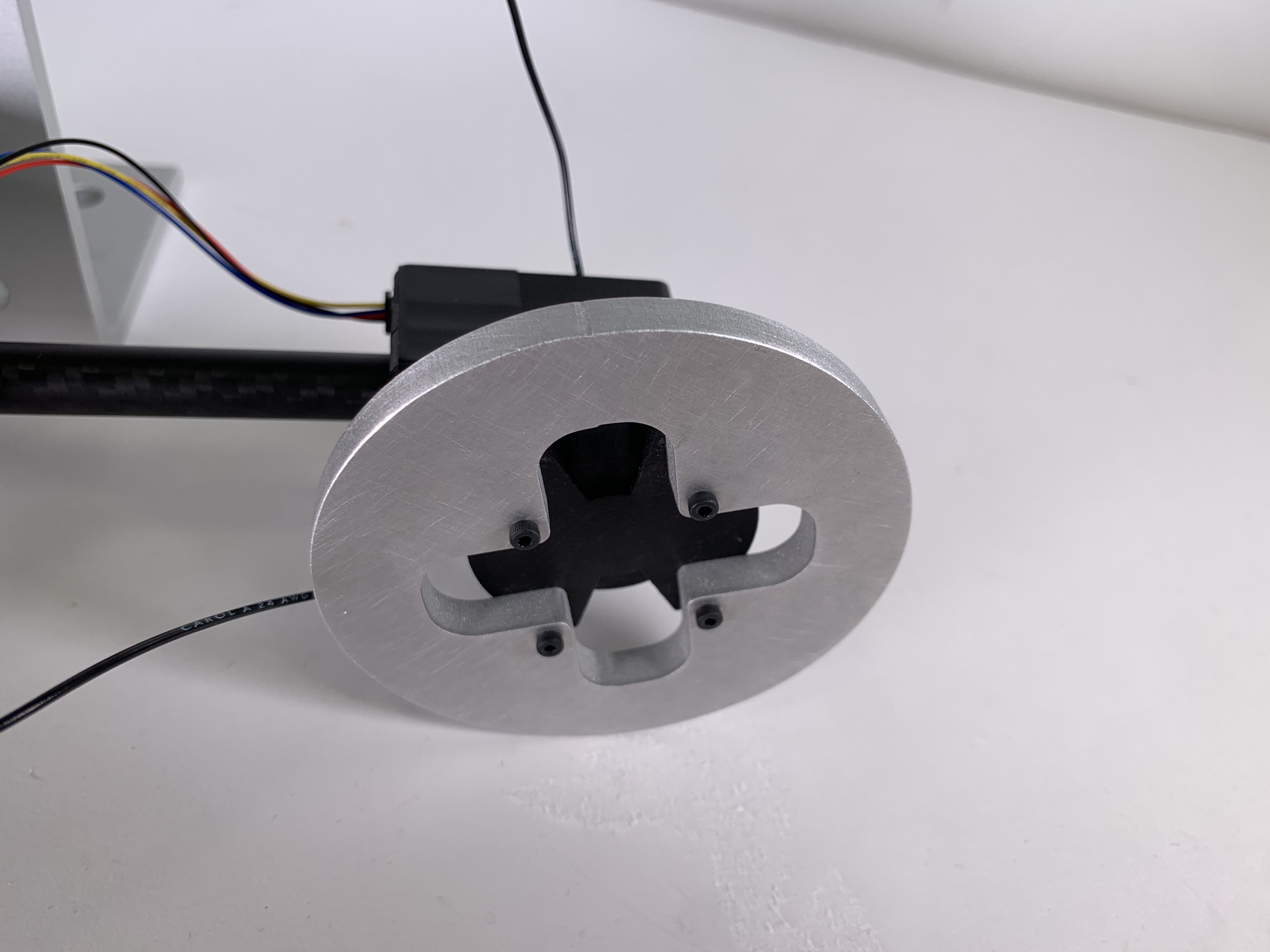
The hardware was done using CAD and a MarkForged 3D printer and mounted onto a carbon fiber tube. The flywheel was cut out of half-inch aluminum using a water jet. Using a gyroscopic sensor, the mounted Arduino was able to control the flywheel and generate torque to correct orientation.
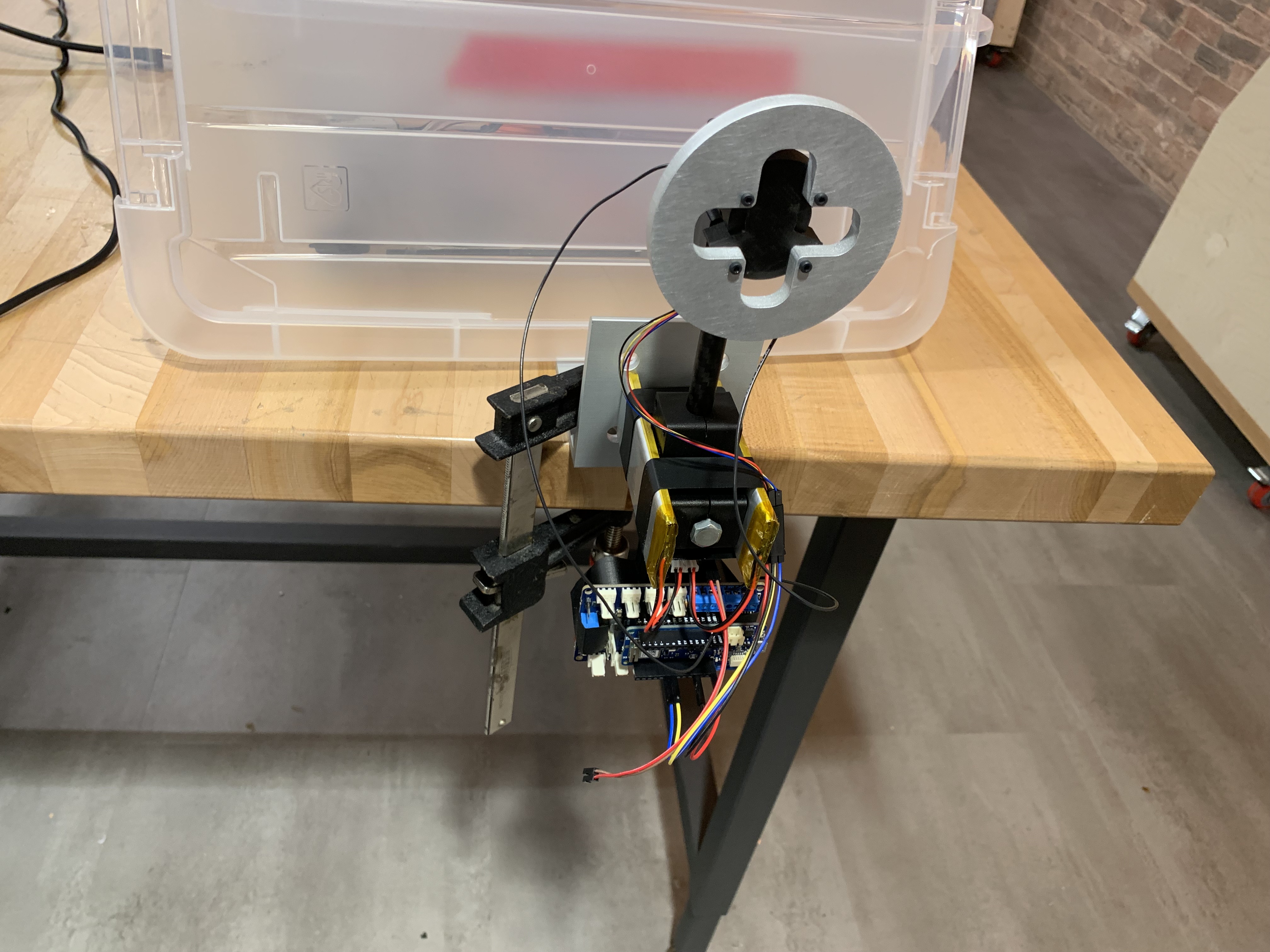
This robot was able to self-balance for a limited time before tipping. This was because the flywheel could only generate torque while accelerating, and once it reached its maximum speed, no more torque could be generated in that direction, and the system would tip. One fix would be to create a heavier flywheel that takes more torque to spin at max speed.